88038威尼斯专栏《科苑·星坛》第七期准时启航!本期将为大家介绍张天雪老师。张老师在通用型FBG形状感知方案,耳道连续体机器人感知方案、形状感知、力感知等方面取得了多项成果。本期将为本科生提供“基于FBG的腔道感知技术研究”小微项目。期待同学们的加入,深入探究科技与生命融合的高新科技,体验医工交叉的学科魅力!
01个人简介

张天雪,女,1992年3月23日生,香港中文大学博士,上海交通大学博士后。现任北京航空航天大学机械工程与自动化学院助理教授,博导,北京市青托人才。长期从事医工交叉学科医疗机器人科研工作。主持国家自然科学基金-青年基金1项,参与面上基金1项。子课题负责人国家重点研发计划-智能机器人重点专项2项,参加农业科技重大项目1项。参与香港研究资助局多项研究计划,参与上海科委等项目。相关标志成果在IEEE Sensors Journal、IEEE TMRB等高水平期刊上发表SCI论文15余篇,累积引用100余次,申请专利15项。获上海交通大学“晨星博士后激励计划”、香港中文大学优秀教学助理奖、机器人学术年会优秀海报奖、获高校机器人教学创新大赛一等奖指导教师,参编出版《机器人控制技术基础》教材。受邀在国内外学术会议报告多次。入选中国仪器仪表学会-国际科技组织储备人才,中国机械工程学会-医工装备分会委员。BIRob和Robot Learning青年编委,IEEE Sensors Journal等期刊,IROS、ICRA等国际会议审稿人、session chair。
02学术成果
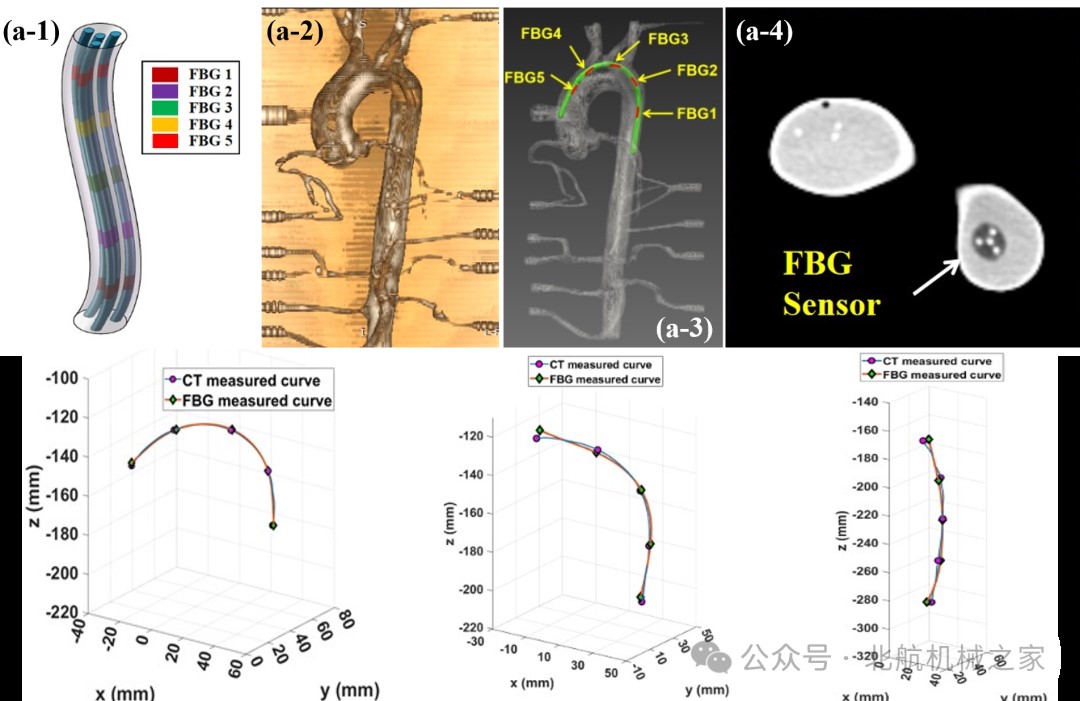
1)通用型FBG形状感知方案
使用多芯FBG光纤重建人体血管形状,建立了4芯光纤5-FBG传感阵列、人体血管模型、CT扫描和动态FBG导管插入的综合实验系统。基于螺旋扩展法(HEM),开发了一种优化的基于FBG传感的空间曲线重建算法——改进的螺旋扩展法(Improved HEM)。根据曲率为复杂的空间曲线设置了不同的采样间隔。与原始HEM相比,该方法将最大重建误差降低了15.611%,重建误差1.3087 mm。
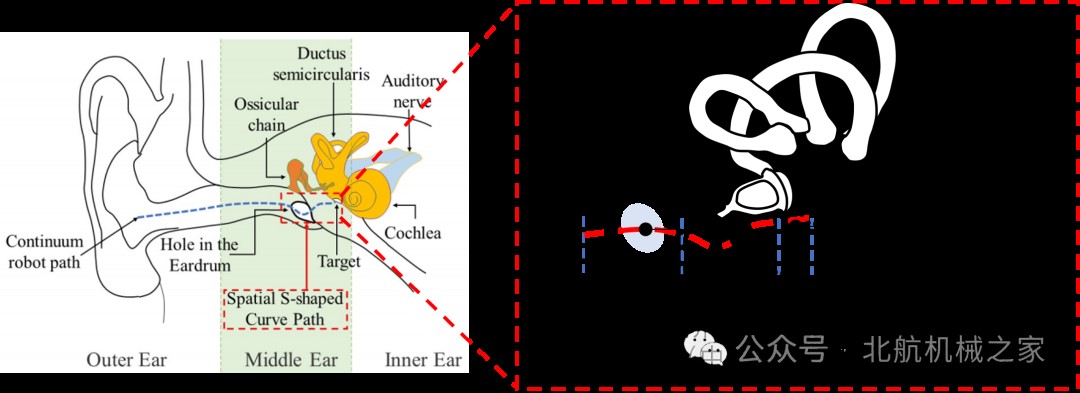
2)耳道连续体机器人感知方案
连续体机器人通过内耳圆窗进行淋巴液注射采样是一种治疗耳聋的新兴术式。这一术式要求连续体避开鼓膜、听骨等重要结构,是一项高精度操作,人工操作难以完成。连续体在中耳段的路径是一段有扭转的曲线,而且这段路径空间狭窄,操作危险性高,需要感知连续体机器人的形状和受力,以避免损伤耳内组织而致聋。因此提出了基于FBG的耳道连续体机器人感知方案。
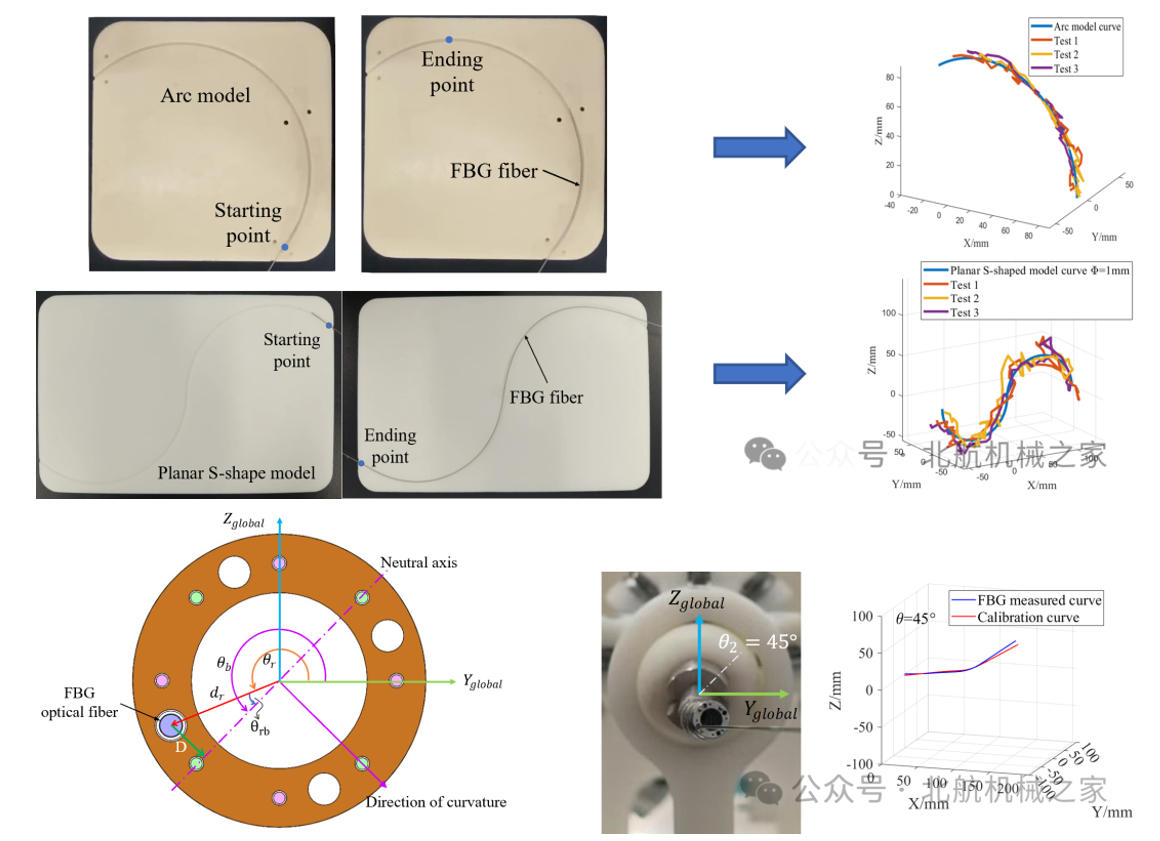
3)耳道连续体形状感知——中耳路径
通过跟踪FBG尖端位置估计模板曲线形状,提出了一种针对离散关节连续体机器人形状重建的误差补偿策略。基于在模板上的动态实验与误差补偿策略,通过跟踪FBG尖端位置估计连续体形状,模拟FBG传感器在耳道内跟随连续体机器人的运动轨迹,形状重建平均误差为1.2163 mm。
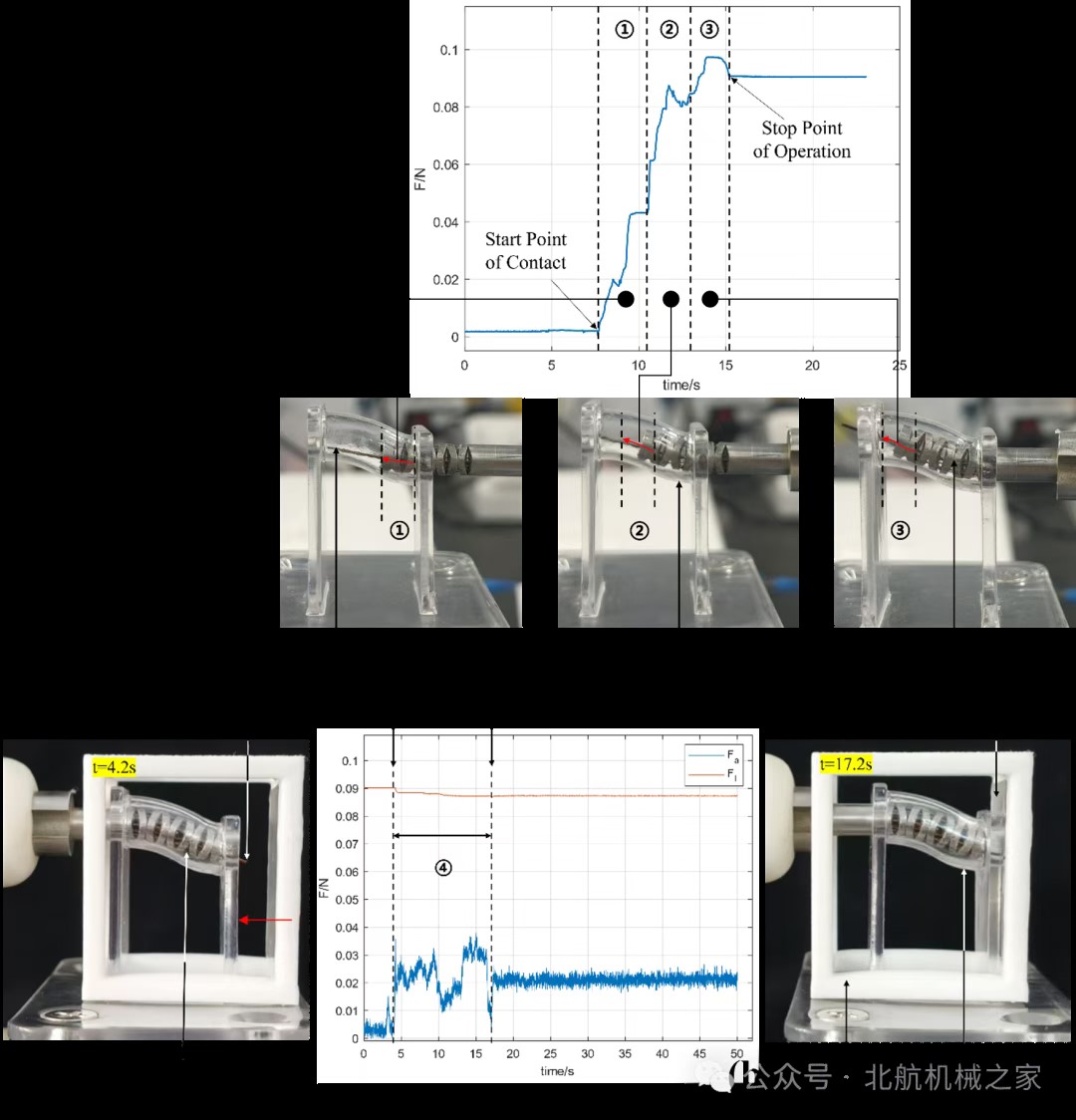
4)耳道连续体力感知——中耳&穿刺
打印的透明树脂耳道体模,模拟连续体机器人在中耳内与骨质结构发生碰撞的场景。在一个的方形框架内侧粘贴PDMS软膜,模拟内耳圆窗龛膜穿刺场景。
03项目介绍
1)项目简介
基于FBG的腔道感知技术研究
通过学习FBG使用方法及基本原理,探索FBG在自然腔道感知技术。包括光纤加工集成工艺、感知算法研发等。
2)所需能力
实验操作能力
数据处理能力
结果分析能力
团队协作能力
3)相关事项
项目周期:2~6个月
所需人数:1~3名本科生
4)联系方式
电子邮箱:tianxuezhang@buaa.edu.cn
04 老师寄语
愿同学们:
敬畏生命,热爱科研
用自己多彩的青春
谱写出奉献的壮丽诗篇
